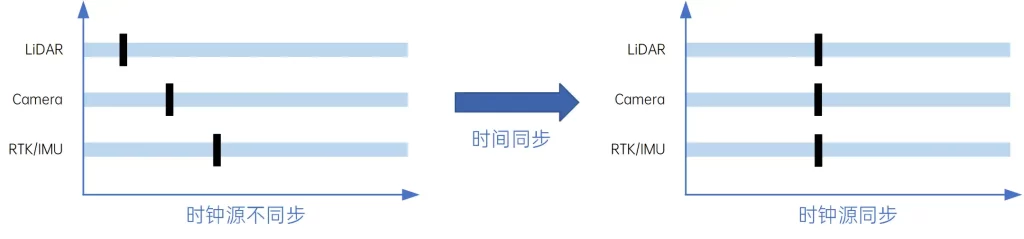
统一时钟源
传感器时间戳
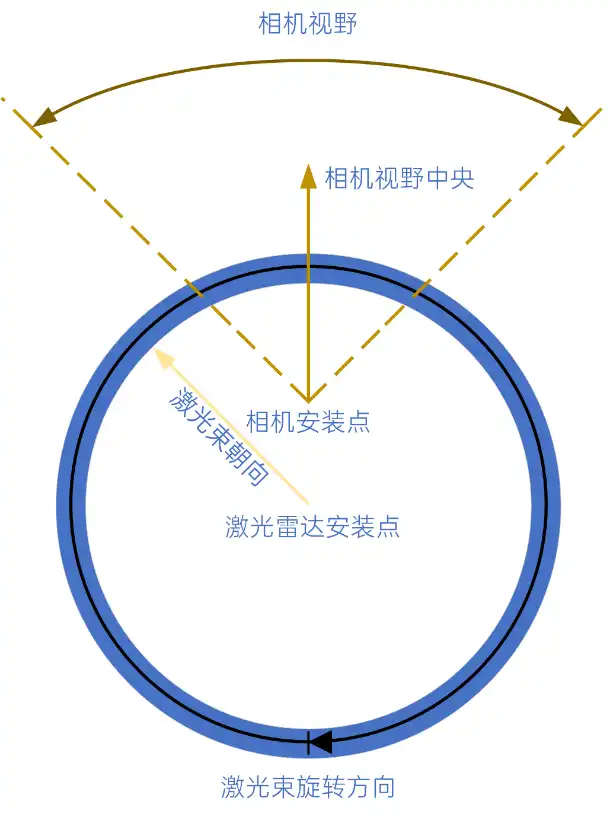
激光雷达与相机时间同步触发
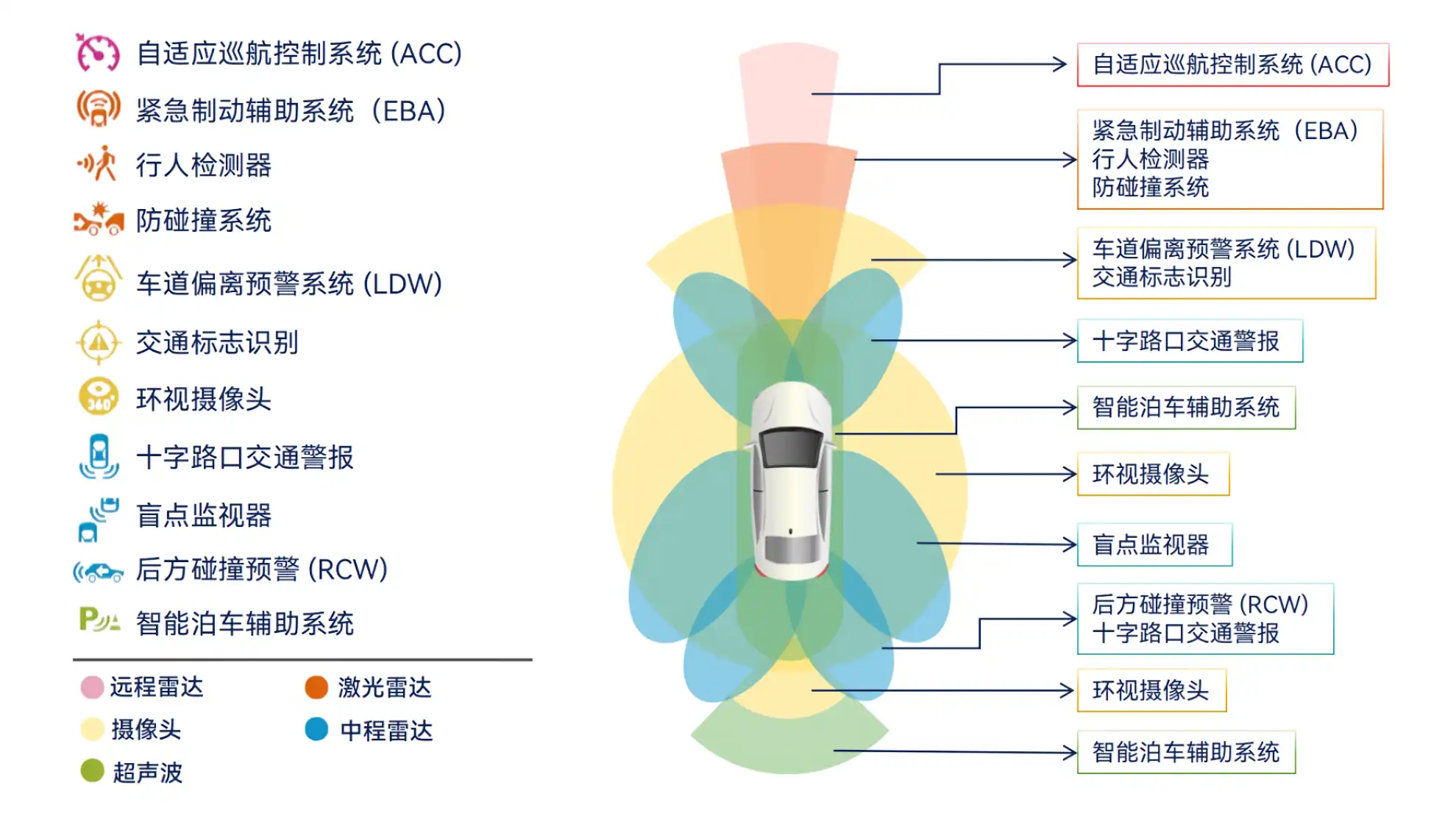
了解不同传感器的功能、优缺点以及应用场景,制定更合理的数采测试方案。
了解PTP 和 (g) PTP时间同步协议、差异性及其在自动驾驶数据采集测试中的重要作用。
了解更多自动驾驶相关内容 →