
仿真模拟方案
在云端和PC端研究和验证高历程实验和恶劣驾驶环境下的AD系统的性能
康谋自动驾驶aiSim模拟仿真SiL解决方案能够研究和验证高历程实验和恶劣驾驶环境下AD系统的性能,支持云端和PC端操作,提供高保真度的仿真环境和传感器模型,实现测试可重复和灵活扩展测试场景,从而显著降低AD系统的开发成本。
方案特点
系统方案
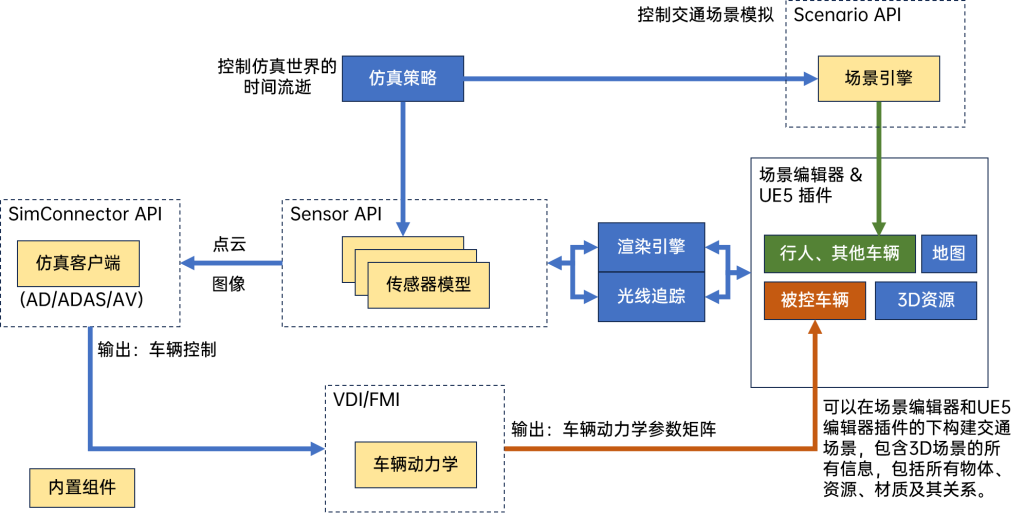
仿真策略
定义仿真客户端如何运行,影响仿真中时间的流逝,提供固定时间步长和实时两种方式

对车辆发出控制命令,评估收到命令后的车辆反应和环境中的要素变化
评估仿真世界的信息更新
♦ 计算车辆位置
♦ 控制其他元素的位置

传感器捕捉仿真世界更新的信息

传感器将信息发送至内置组件
内置组件
♦ 由库进行序列化、交换和传输原始二进制结构
◊ 进程初始化和场景处理
◊ 传输传感器数据
◊ 提供油门、刹车、转向等车辆执行接口
♦ 支持固定步长和实时两种仿真策略
♦ aiSim-Unreal Editor 预配置插件支持场景定制内容开发,内置多种资源
◊ 地图编辑
◊ 资源创建、导入和编辑
◊ 行人模型和动画
◊ 丰富车辆模型
♦ 车辆动力学模型基于广泛的车辆动力学参数
◊ 来源:OEM、现有参数计算、工程文献
♦ 对实际车队进行静态测量,可确定车辆几何形状、车轮载荷、车辆重
心、转向传动比
♦ 对实际车队进行动态测量,可确定过转向梯度、曲线刚度、偏航惯性
♦ Vulkan API 为基于物理原理的传感器模型提供和 GPU 通信的单一接口
♦ 在多GPU环境下支持本地光线追踪和光栅化处理,能够在实时环境下逼
真模拟所有传感器模态
♦ 内置20多个即时使用的传感器模型,同时 Sensor API 支持集成用户或第
三方供应商开发的传感器模型,用于快速测试和验证不同类型的传感器
{kind=link}