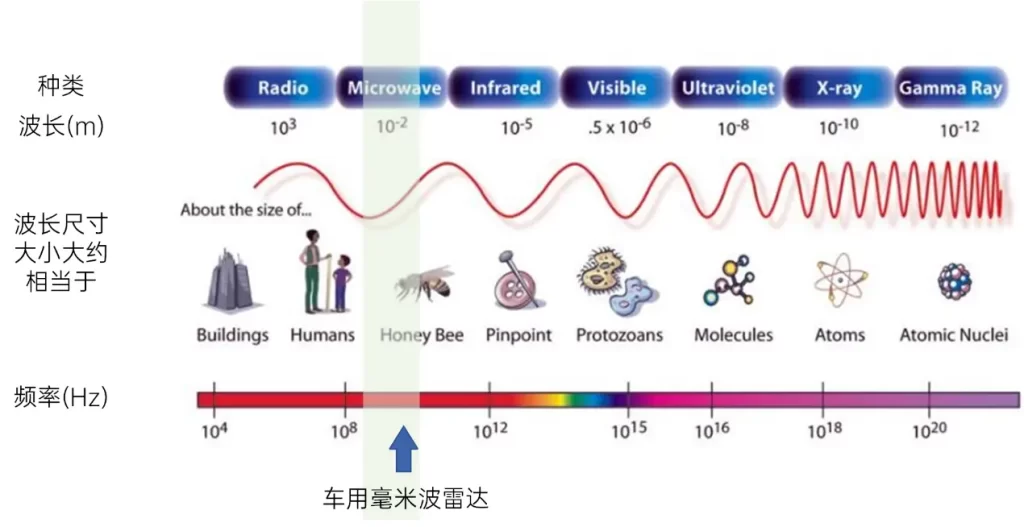
图1:毫米波雷达频段
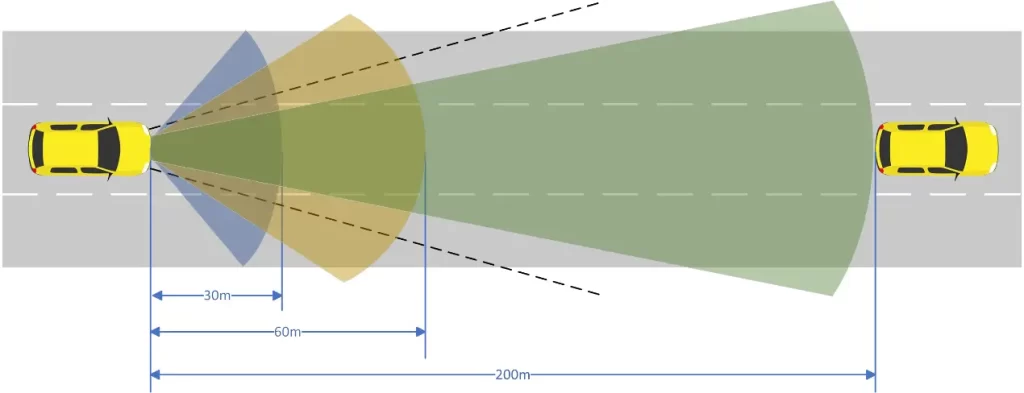
图2:短、中、远程雷达
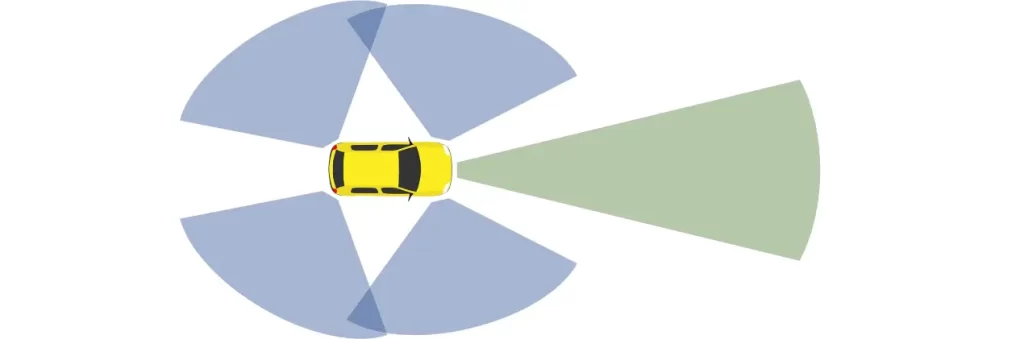
图3:角雷达与前向雷达
功能
短程雷达SRR
中程雷达MRR
远程雷达LRR
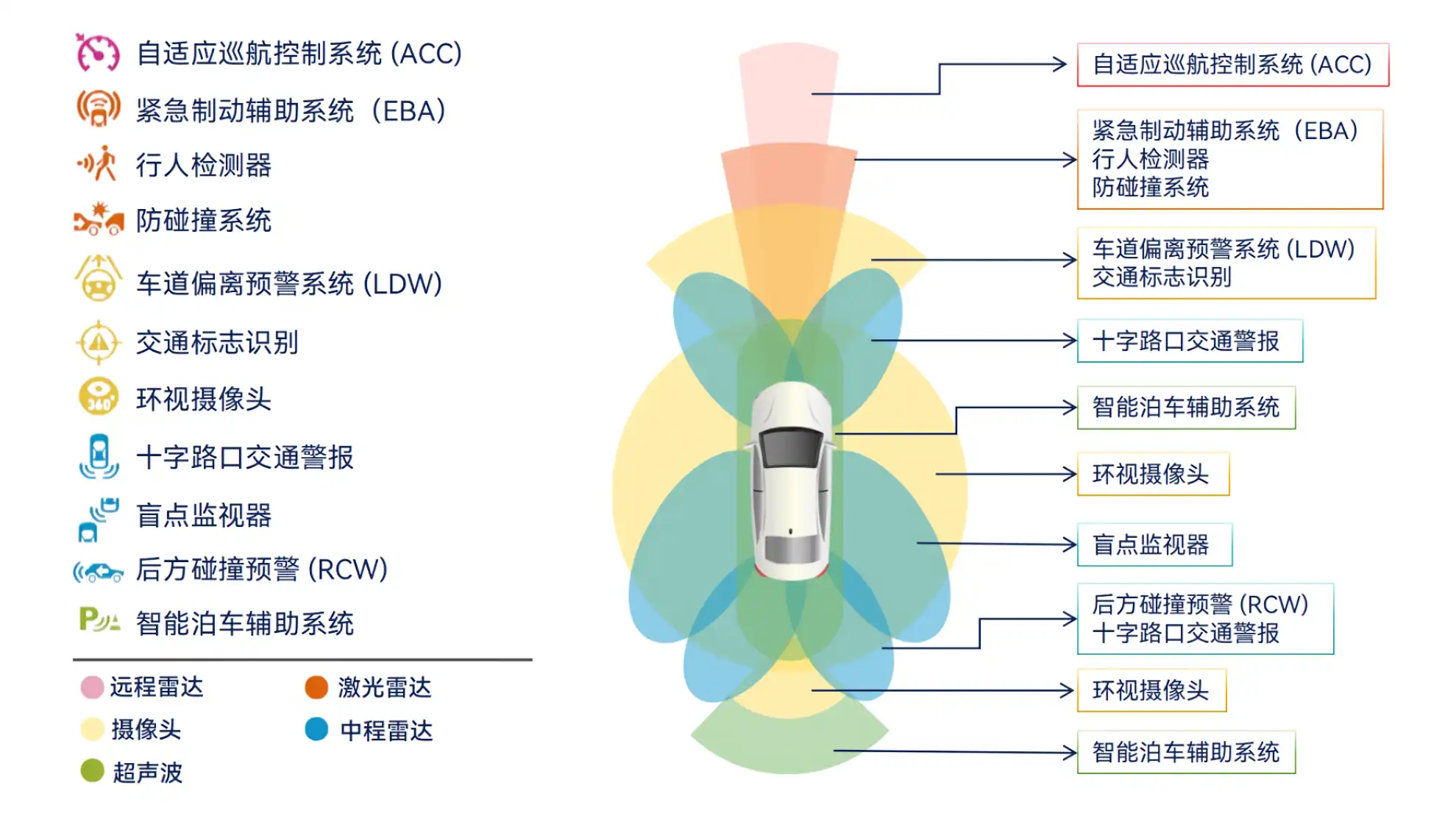
盲点识别 (BSD)
后方
–
变道辅助 (LCA)
自动代客泊车 (AVP)
交通拥堵辅助 (TJA)
前方
自适应巡航 (ACC)
前方碰撞预警 (FCW)
自动紧急制动 (AEB)
行人检测系统 (PDS)
了解不同传感器的功能、优缺点以及应用场景,制定更合理的数采测试方案。
了解更多自动驾驶相关内容 →