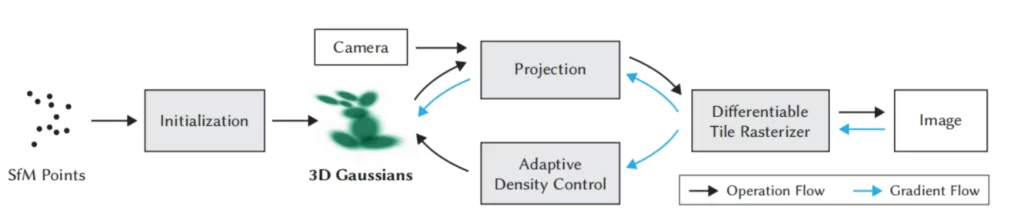
图1:3DGS重建流程
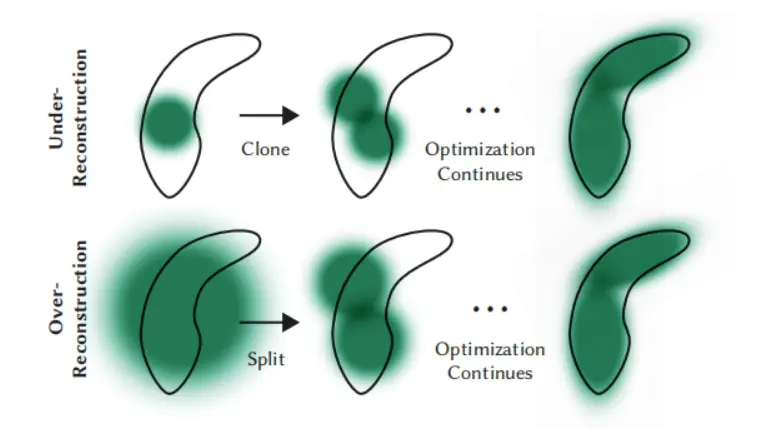
图2:训练过程中高斯点的优化
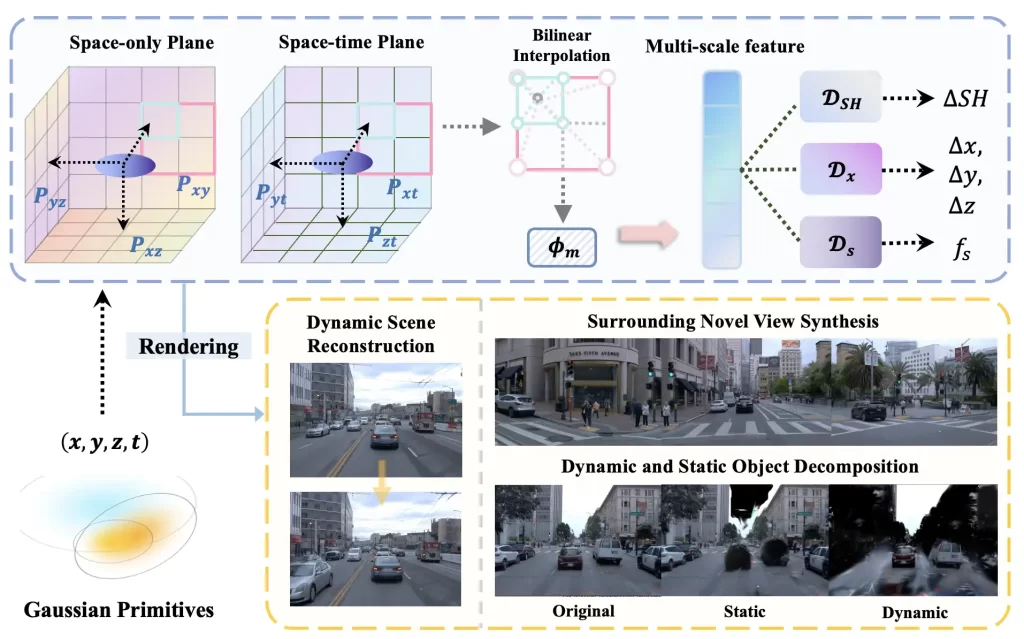
图3:S³Gaussian方法
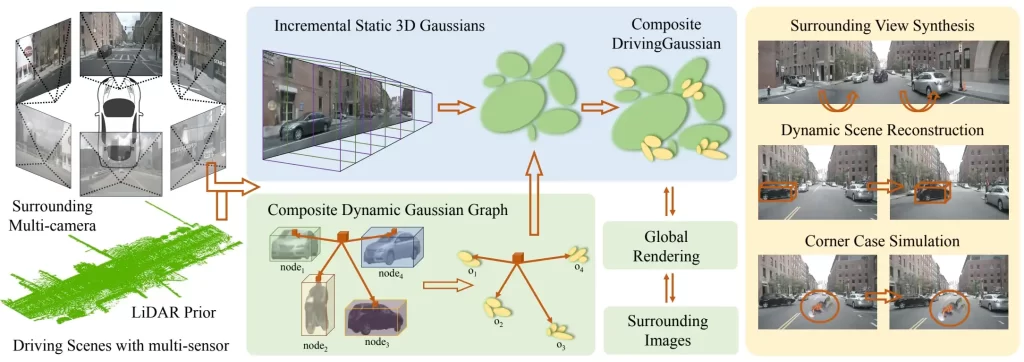
图4:DrivingGaussian方法
高逼真合成数据助力智驾“看得更准、学得更快”
了解更多自动驾驶相关内容 →