当前,三维重建技术正处于从"实验室演示"迈向"工业级应用"的关键时期。每一次对场景细节的精准还原,每一帧实时流畅的渲染效果,都在检验算法对真实世界的复现能力。高效、高质量的三维重建能够显著提升数字资产制作效率,助力提升虚拟测试的真实性,加速仿真验证流程。
然而,在"平衡重建质量与效率"这一核心目标下,现有技术仍面临诸多挑战,包括大规模场景的处理效率、动态物体的建模能力,以及跨平台部署的兼容性等难题。针对这些问题,康谋也有一些思考、经验与看法,本文将与大家一起交流,介绍3DGS原理框架、实战 demo 与自驾仿真落地探索等相关内容。
3D Gaussian Splatting(3DGS)是一种基于数百万个可学习的“3D色块”来实现逼真3D场景实时渲染的新兴技术。这里的“3D色块”实际上是指3D高斯球——每一个都是具备位置、形状、颜色和透明度属性的基础单元。
利用这些高斯球,我们可以对真实场景进行三维重建,再通过Splatting技术将其投影至二维平面,最后借助图像分块的光栅化方法渲染成最终图像。
以下展示的是采用3DGS技术重建的部分场景,不难看出,无论是场景的细节还原度还是色彩表现力,效果都十分出色。
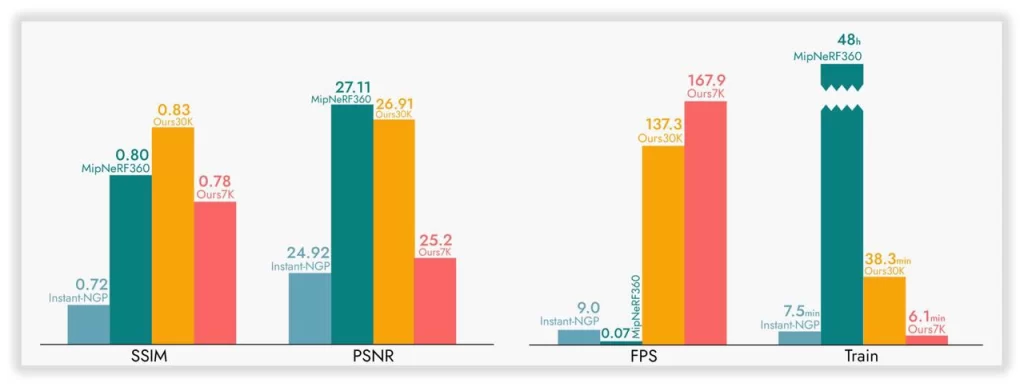
在保持高保真度场景重建的同时,3DGS技术还具备出色的渲染速度,这得益于其采用的基于图像分块的渲染方式。通过与其他三维重建方法对比可见,3DGS在视觉效果上能够媲美NeRF-360,而训练时间却大幅缩短至几十分钟甚至几分钟。相较于NeRF-360动辄数十小时的训练成本,这无疑是一项重要突破。
能够在与Instant-NGP相当的训练时长内,达到接近NeRF-360的重建质量,正是3DGS技术的关键优势所在,也是其在三维重建领域持续受到关注的重要原因。
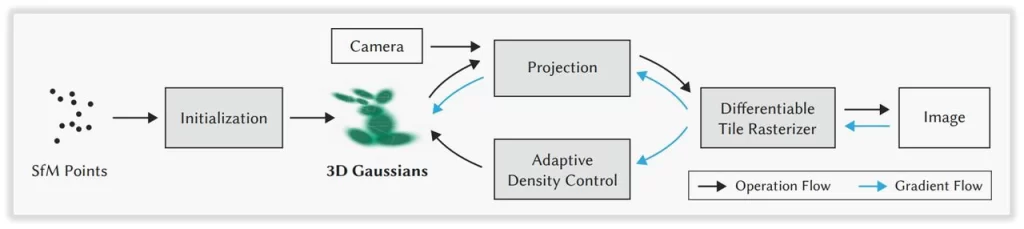
3D Gaussian Splatting(3DGS)的整体框架是一个端到端的管道,其核心思想是将整个三维场景表示为数百万个可学习的3D高斯球。这些高斯球作为场景的基本表示单元,每个都拥有各自的属性,包括3D空间中的位置、描述其形状与方向的协方差矩阵、以及视角相关的球谐函数所表示的颜色和不透明度。
整个流程可以分为7个步骤:
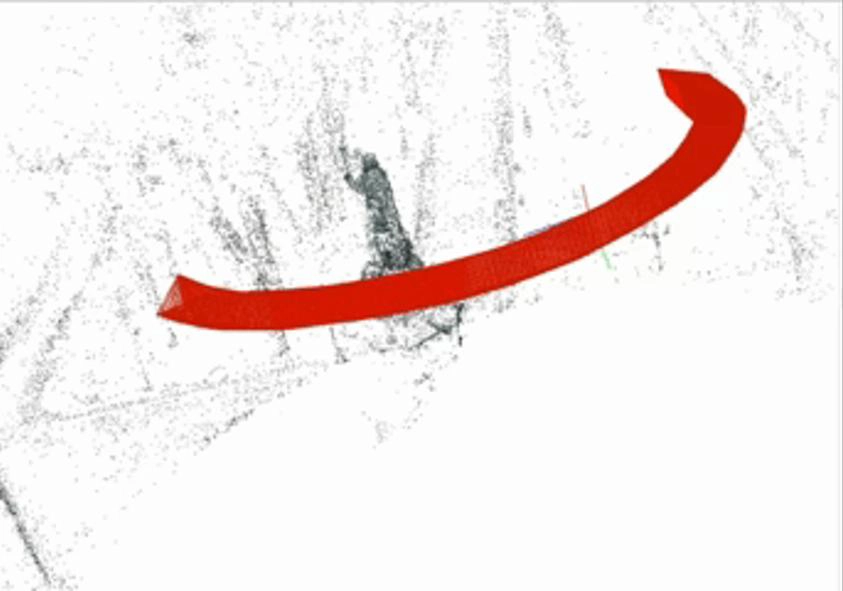
利用开源模型就可以进行一些场景的重建:
以下是初始化点云和训练迭代2万次后的点云对比,可以看到迭代训练后的点云信息更加丰富,场景细节更加多样。利用这些点云和3DGS椭球就可以构建出逼真的三维场景。
康谋推出的 World Extractor 能从原始传感器数据中,直接创建出3DGS重建的数据信息,从而可以直接导入康谋仿真软件aiSim中,进行场景渲染。这大大节省了仿真场景构建时间。
aiSim通过优化渲染模型,可以获得高保真的3DGS场景导入。
左边是渲染优化前,会出现大FoV相机不一致性。右边是渲染方案优化后,可以增强一致性。
网格阴影表现(左)、环境反射表现(右)
在系统探讨了3DGS的技术原理与实践路径后,我们需要清醒地认识到:这项技术正处在从"可用"到"好用"的关键演进阶段,同时也存在着很多待发展的技术要点和面临的挑战!
3DGS技术正沿着效率极致化与能力边界拓展的双重路径演进。一方面追求超大规模场景的实时重建与交互,另一方面致力于实现动态场景的精准建模与语义级理解。
3DGS技术在渲染质量与动态场景处理方面仍存在理论瓶颈,其"黑箱"特性与数据依赖性也制约了技术的规模化应用。这些挑战亟待从算法原理与工程实现层面协同突破。
显而易见,3DGS以创新的3D高斯球表示方法,在重建质量与效率间实现了突破性平衡。从技术原理到实战演示,再到康谋在自动驾驶仿真中的完整工具链实践,3DGS展现了显著的工程价值。
尽管在动态场景处理和渲染质量方面仍面临挑战,但随着硬件加速和算法优化的持续推进,3DGS有望在自动驾驶、数字孪生等领域发挥更大价值,为三维重建技术开启新的可能!
端到端已来,智驾仿真测试该怎么做?探索全新的智驾仿真解决方案 。
高逼真合成数据如何助力智驾 “看得更准、学得更快” 。
了解自动驾驶行业见解与最新技术,获取有价值的知识和分析 。