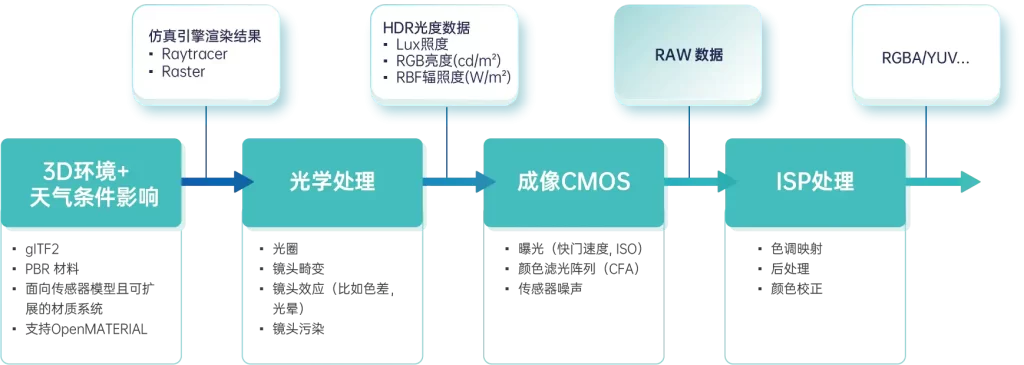
图1:完整相机模型仿真工具链
图2:8bit CFA Bayer(预处理)
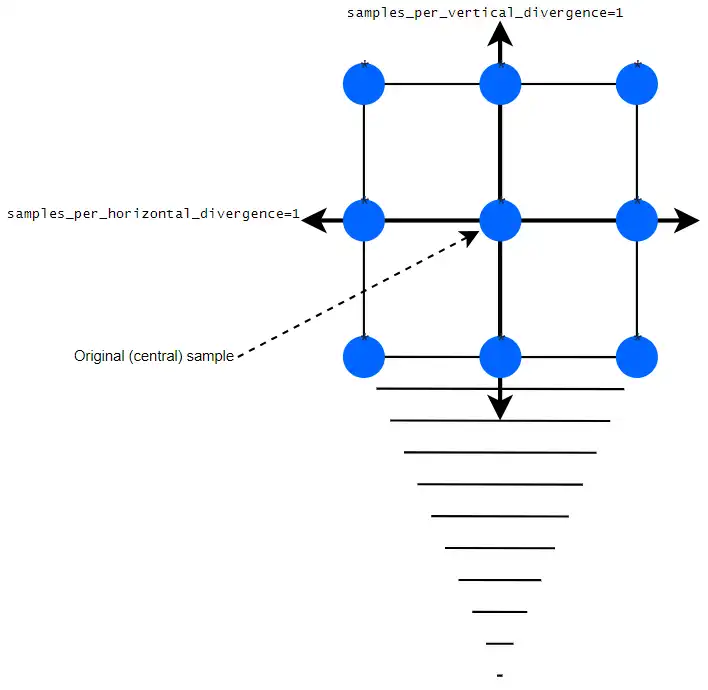
图3:在发射角范围内进行指定数量的采样
端到端已来,智驾仿真测试该怎么做?探索全新的智驾仿真解决方案 。
高逼真合成数据如何助力智驾 “看得更准、学得更快” 。
了解自动驾驶行业见解与最新技术,获取有价值的知识和分析 。

-1024x576.webp)