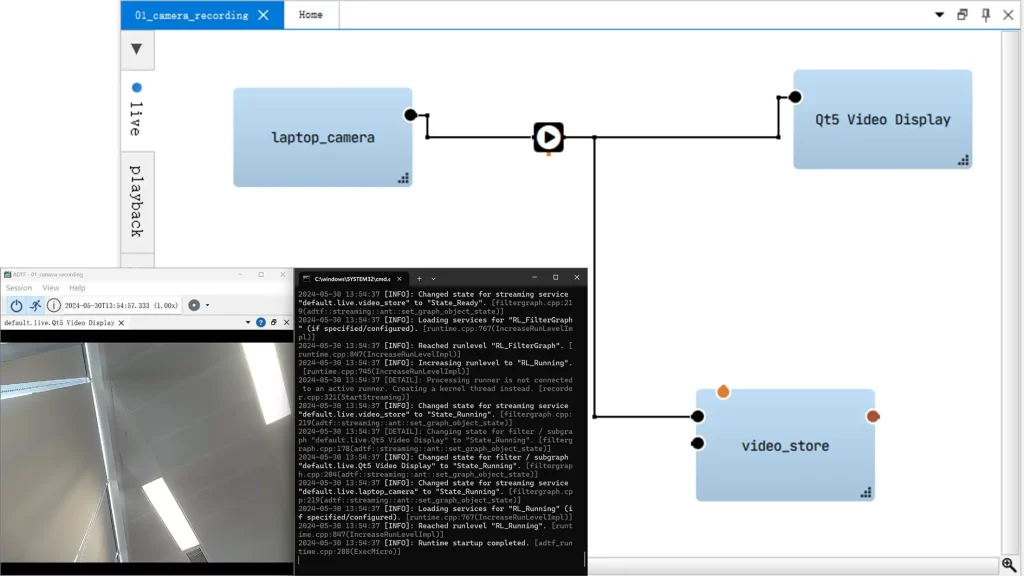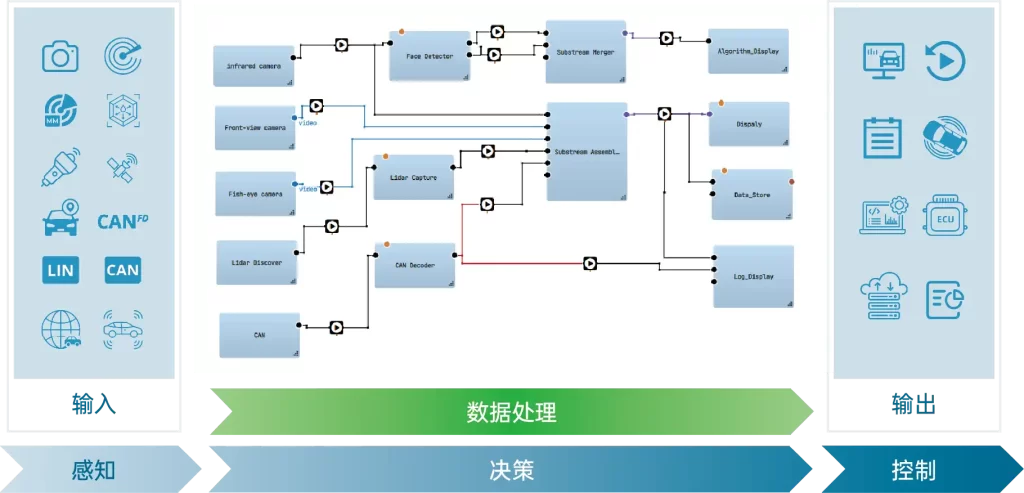
数据记录与回放
支持视频、LIDAR、RADAR等多源传感器数据及车辆状态信息的记录,并提供精确回放功能,确保自动驾驶功能测试与验证的数据一致性和准确性。
硬件集成
基于AUTOSAR和ASAM等标准,ADTF实现与多种车辆总线系统和传感器的即插即用集成,简化了硬件设备连接和数据交换。
测试与验证
集成模拟、原型制作和数据记录等多种工具,全面支持软件的测试、验证和评估过程。

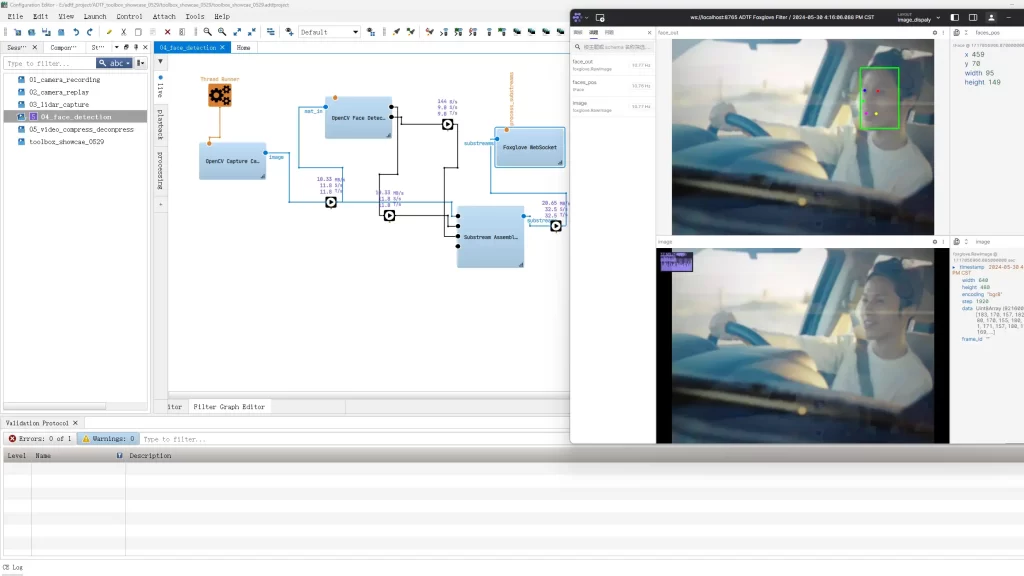
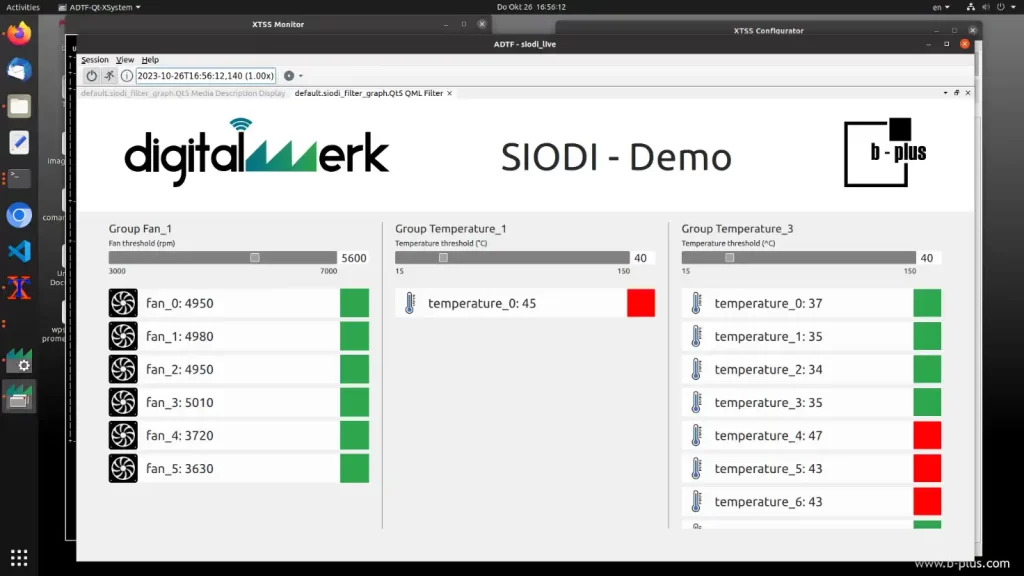
数据可视化
支持二维和三维数据的可视化,包括信号绘图、Qt、OpenGL和OSG的2D/3D可视化工具。

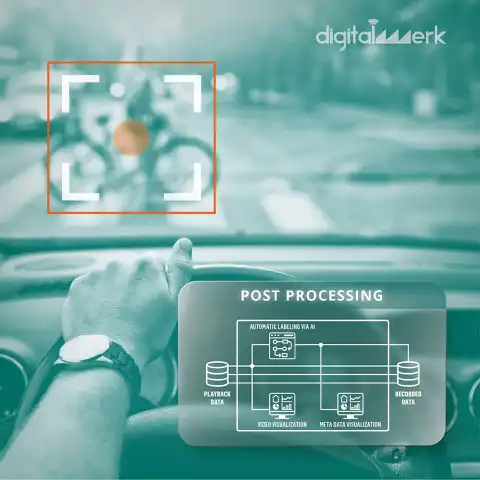
后处理与模拟
支持深入的测试后数据分析和验证,确保算法和功能正确,同时提供模拟环境以在无硬件条件下测试软件组件。

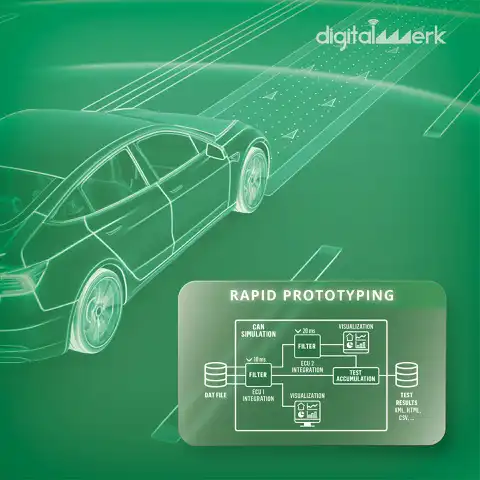
快速原型开发
ADTF SDK和开源组件支持自定义开发ADTF过滤器、服务或独立应用程序,提供高度灵活性和定制化解决方案。