
{kind=link}
康谋 Coppeliasim 机器人仿真平台
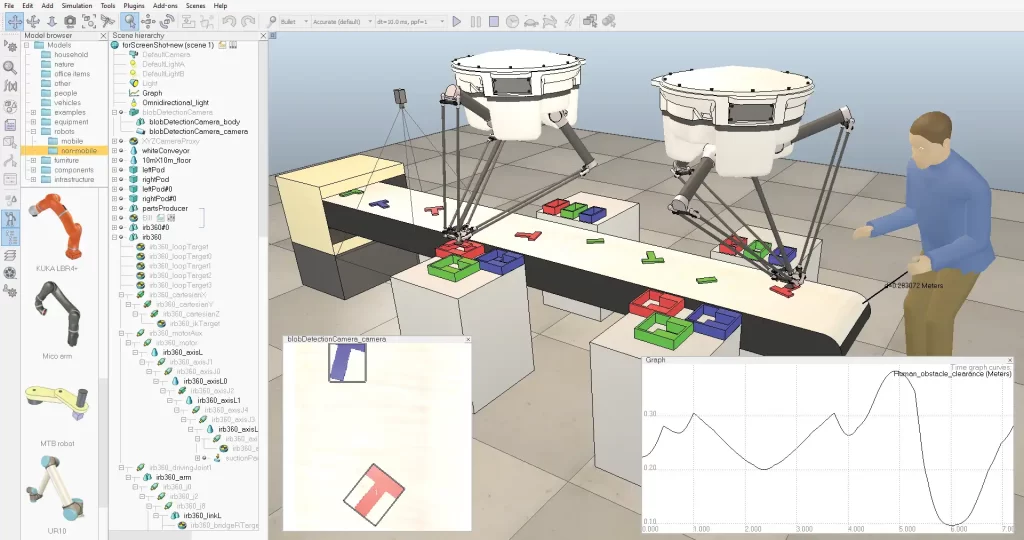
CoppeliaSim 是一款基于分布式控制架构的多功能机器人仿真平台,聚焦具身智能领域,可完成具身智能体的全流程测试与验证,覆盖感知算法原型开发、运动学设计、数字孪生创建及强化学习训练。
平台支持“创建-组合-仿真”全链路操作,可精准模拟真实物理交互与多模态感知场景,适配人形、机械臂等各类具身智能体模型开发需求,无缝对接主流框架与 ROS/ROS2 生态,大幅缩短研发周期、降低落地成本。
核心功能
多物理引擎
内置 MuJoCo/Bullet Physics 等5款物理引擎 。精准模拟碰撞、抓取、软体交互、绳索布料等真实物理场景。
正逆运动学
支持分支、闭环、冗余自由度以及嵌套回路等任意机构的运动学求解,提供可嵌入式算法模块
高精度传感器仿真
提供精确的体积接近传感器和视觉传感器模拟,支持图像处理与插件灵活扩展,支持网格、点云等格式
灵活路径与运动规划
基于封装 OMPL 库的插件,提供高度灵活的路径规划与运动规划能力
API与多语言支持
支持 5 种编程模式,覆盖Python、Lua、C/C++等 7 种编程语言,兼容 ROS、ZeroMQ 等通信方式
高效碰撞与距离计算
快速完成网格、八叉树、点云等组合形式的碰撞检测,精确计算任意网格、八叉树、点云之间的最小距离
丰富插件与附加组件
提供轨迹生成、自定义用户界面、计算机视觉、计算几何等各类功能插件,支持多种格式的导入导出
更多特色功能
支持 Web端 多级撤销 / 重做、视频录制功能。可仿真喷涂或焊接轨迹,兼容八叉树、点云数据处理
应用场景:具身智能本体开发与原型快速迭代
加速构型迭代
仿真支持快速修改机械参数、关节自由度及传感器布局,在软件中预验证“脑干协同”效果,减少物理样机改版次数,降低研发成本。
边界测试与风险规避
在虚拟空间内模拟极端动作、不平整地形或复杂交互,提前识别动力学缺陷与失稳风险,避免实机调试中的坠落、碰撞等硬件损耗。
合成数据采集
利用仿真自动生成带有深度、语义分割和力觉信息的标注数据,为感知算法训练提供高质量、低成本的无限样本支持。
长效研发资产
构建数字化的机器人本体与环境资产库,减少对物理实验室场地的依赖,提升团队在不同构型开发上的协作效率。
应用场景:复杂任务策略训练与虚拟部署验证
任务效能动态可视化
直观呈现机器人在家庭、仓库等非结构化场景下的运行效能,通过实时数据可视化支持算法评审与演示。
虚拟训练与迁移加速
在仿真环境中进行高频强化学习与动作规划训练,降低硬件损耗与维护成本;同步完成软件预部署与策略调优,缩短 “Sim-to-Real” 迁移周期。
多维环境泛化验证
通过动态调整光照、摩擦力及障碍物布局等参数,验证算法跨地域场景的鲁棒性,优化多工况适应能力。
极端工况安全预演
模拟电机失效、通信延迟等异常状态,测试机器人安全保护机制,确保实地运行中人机交互与故障应对的安全性。
产品选型
Coppeliasim 基础版
- 全功能编辑能力
- 完整仿真功能支持
- 商业用途许可
- 支持客户分发封装
Coppeliasim 专业版
- 全功能编辑能力
- 完整仿真功能支持
- 商业用途许可
Coppeliasim 教育版
- 仅限教育用途
- 全功能编辑能力
- 完整仿真功能支持
- 商业用途许可