端到端已来,智驾仿真测试该怎么做?
一文看懂端到端智驾仿真测试解决方案
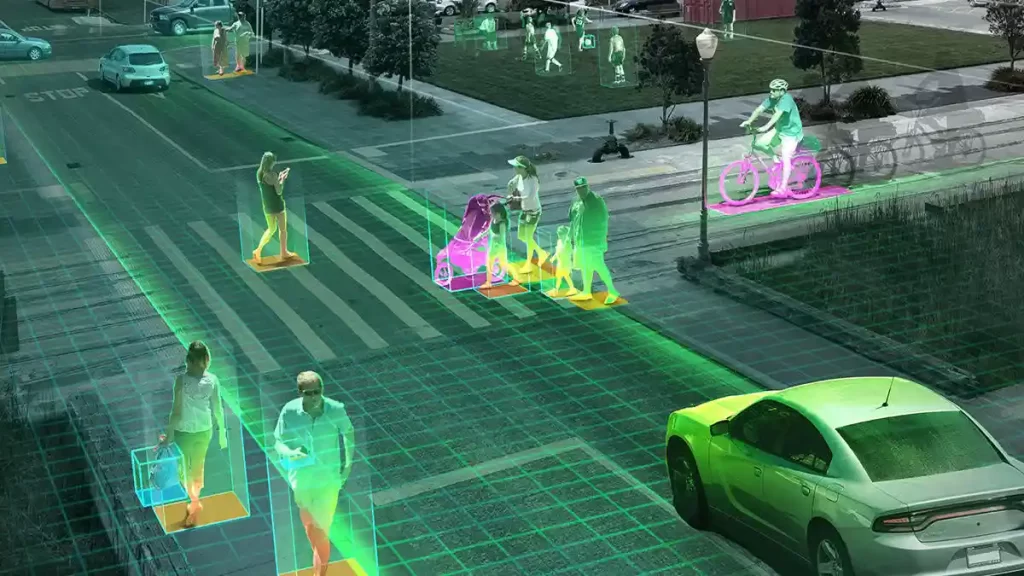
高逼真合成数据助力智驾“看得更准、学得更快”
自动驾驶研发如何高效获取海量训练数据?高逼真合成数据技术正在提供新解法。
如何巧用合成数据重构智能座舱
如何利用合成数据技术,为智能座舱研发提供海量训练样本与极端场景模拟,从而突破真实数据采集的局限?
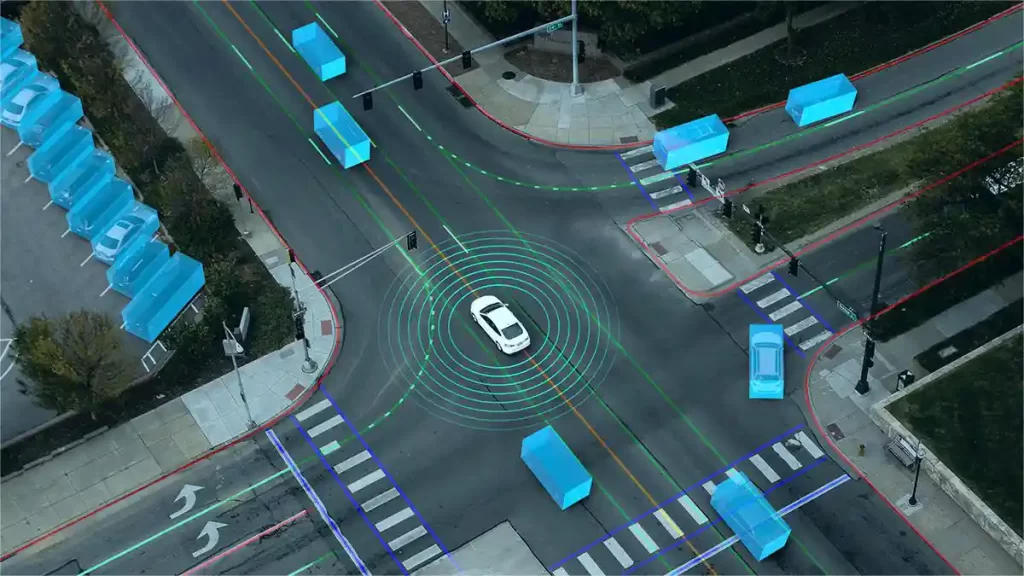
在开发自动驾驶解决方案时,逼真的天气模拟是必不可少的。通过使用aiSim,您不仅可以模拟晴天、雾天、雨天或下雪天,还可以模拟黎明、黄昏或蓝光时间(人工光源和阳光混合)。所有这些都是通过基于物理的光照强度计算完成的,并且在所有传感器模式中都是完全确定和一致的。
aiSim提供不同复杂程度的车辆动力学模型以适应不同的用例。简单的模型通常适用于外部车辆,复杂的模型适用于自车。通过aiSim的车辆动力学接口(VD)或是功能模拟单元(FMU)使用车辆动力学模型。
康谋aiSim仿真软件提供包含数百个与功能安全相关的基本场景的库。通过修改参数,如参与者行为、天气变化、道路状况和传感器退化等情况,可以生成丰富多样的场景。
通过aiSim client可以实现aiSim和自动驾驶软件的连接,client将收集到的传感器仿真数据实时发送给自动驾驶软件。
支持。除了aiSim中内置的镜头畸变模型以外,用户也可以使用aiSim client实现自定义的镜头畸变算法,并应用于每个图像输出中。
康谋aiSim可以实现一个自动驾驶算法同时测试多个场景;通过aiSim CLI还能够实现多个算法同时测试多个场景。
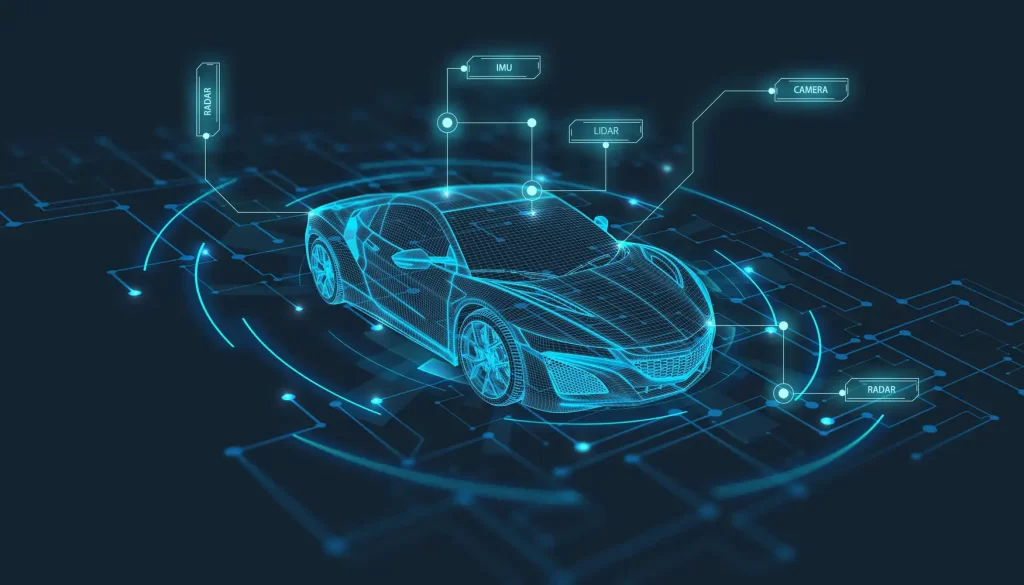
多传感器数据融合技术与策略解析
如何通过高效整合多元数据提升系统性能与决策精度。
自动驾驶:揭秘高精度时间同步技术
传感器数据精准记录遇阻?时间同步技术或是破局关键。
深入洞察 ADAS 数据采集前沿技术,获取应对复杂数据采集挑战的有效策略,助力行业突破技术瓶颈。
支持任何数据源和传感器,只需要搭配不同的转换设备来进行接口及协议的匹配和转换。
基于LV124,在完整系统负载下,以6.5 m/s²条件下通过测试LV124 规范是汽车行业中用于评估车辆电气系统的耐久性和可靠性的标准之一,由德国汽车工业联合会(VDA)颁布。
BRICK2配备了时间同步服务XTSS软件,能够为传感器(摄像头、激光雷达)每个数据包打上时间戳。在多传感器测量系统中,能够确保整个系统的时钟都在同一时间基准中运行。在CTSS(集群时间同步服务) 中主要参考GPS的时间,在PTSS(平台时间同步服务)中主要依靠BRICK2硬件本身的时钟,并通过以太网同步其他硬件设备(MDILink和NETLion)。
NETLion有两种工作模式,分别是转换和TAP模式。前者是T1和T/TX的转换;后者主要用于数据无损解耦给其他设备(ECU),通过NETLion的设置端口也可以实现线束检测的功能。
MDILink主要是将摄像头的数据(CSI2、FPD、GMSL2)进行解耦,通过以太网的形式传给BRICK2设备。一个MDILink可以接两个摄像头,支持输入和输出。NETLion1000同样支持两路激光雷达进行数据传输,支持网络TAP模式和双介质模式的转换。
两台MDILink设备均连接到BRICK2时,相互之间不会产生信号干扰。MDILink有STP双绞线版本,增强了设备的抗干扰能力。
PIPL与GDPR下,如何确保数据合规?
数据隐私安全成拦路虎?一文剖析PIPL与GDPR的异同,助您准确把握法规要求。
如何高效识别和提取驾驶记录中的场景
基于场景的验证是AD/ADAS系统开发的重要步骤,如何自动识别和分类挑战性场景?
清晰掌握 2026 年实施的车辆辅助系统最新标准与评估要点,助力您在车辆安全技术领域抢占先机。
匿名化的效率需要从多个角度考量,比如硬件和云端提供的算力,以及数据在不同IO环境下的读写速度都会影响匿名化的效率。对于匿名化的质量来说,我们针对公开数据集在不同的感知任务上进行了测试,基于DNAT的匿名化方案能够有效保留数据特征,且在匿名化识别率上基本可以实现95%+。
目前支持人脸、全身、车牌的识别和匿名化处理,如果需要用自己的算法做匿名化也可以只提供检测的部分。准确率通常取决于图像的质量和数据流的稳定性,理论上可以达到99%,实际运行过程中也可以达到95%以上。如果有需要且预算充足,可以特定进行相关测试。
默认情况下,工具可以提取12个类别:切入、切出、接近慢速车辆、接近制动车辆、接近停止车辆、自车变道、自车超车、后方车辆超车、自车跟车、后方车辆跟车、对向车辆接近、自车转弯。其它类别可以基于进一步深入讨论做定制化。