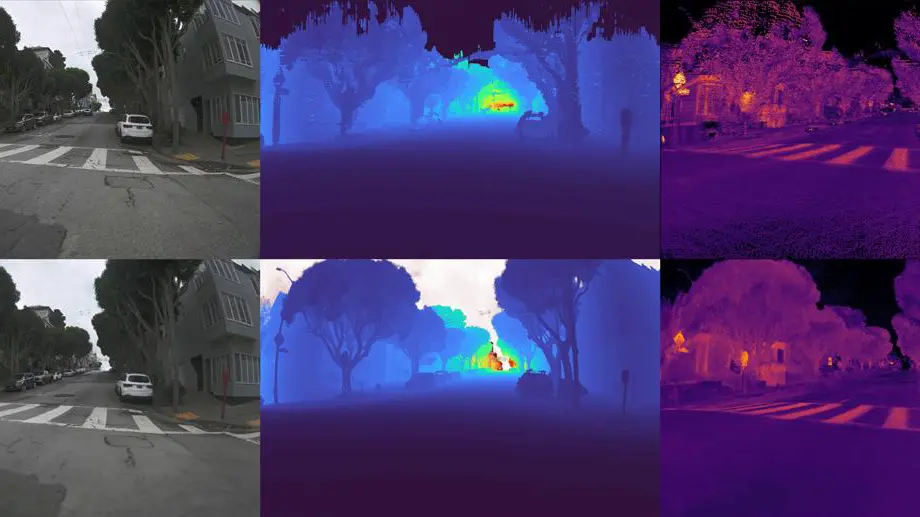
复杂自动驾驶解决方案的虚拟验证需要多样化的 3D 场景与丰富的数字资产,以确保传感器模型的仿真数据与真实世界条件高度吻合。然而,传统的3D建模方式往往面临耗时冗长、成本高昂的挑战。
康谋高保真自动驾驶场景重建方案,能够利用神经重建技术大规模生成精确的环境,实现“规模化产出”的突破。您只需花费传统建模方案的极小部分时间和成本,即可满足自动驾驶虚拟验证对场景数量与质量的双重要求,为方案迭代与传感器测试提供有力支撑。
2000+ 内置 3D 资产,包括车辆、VRU、交通信号灯和标志等元素,构建多样化测试环境。
同时支持3DGS和NeRF生成场景,以适应实时性能和最高的保真度。
选用摄像头/雷达/激光雷达等模型,可集成自定义传感器,满足复杂感知系统的仿真需求。
基于OpenSCENARIO 1.2构建标准场景。
支持泊车场景/城市道路/测试场/自定义场景等多种ODDs,实现广泛适配的环境生成能力。
让AI自己去发现和创造那些更加难以想象的边缘场景 →

{kind=link}








{kind=link}