类型
功能
优点
缺点
范围
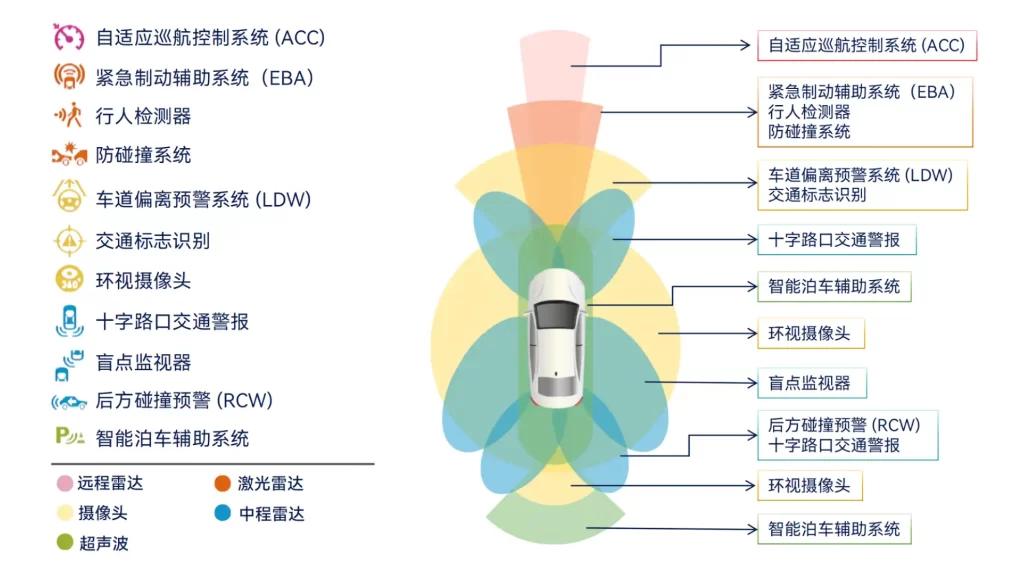
激光雷达
障碍物探测识别车道线识别辅助定位地图构建
– 精度高
– 探测范围较广
– 可以构建车辆周边环境3D模型
– 容易受到雨雪雾等恶劣天气影响
– 技术不够成熟
– 产品造价高昂
200米以内
摄像头
障碍物探测识别车道线识别辅助定位道路信息读取地图构建
– 可对物体几何特征、色彩及文字等信息进行识别
– 可通过算法实现对障碍物距离的探测
– 技术成熟成本低廉
– 受光照变化影响大
– 容易受到恶劣环境干扰
最远探测范围可超过500米
毫米波雷达
障碍物探测(中远)
– 对烟雾、灰尘的穿透能力较强
– 抗干扰能力强
– 对相对速度、距离的测量准确度非常高
– 测量范围相对Lidar更窄
– 难以辨别物体大小和形状
超声波雷达
障碍物探测(近距)
– 技术成熟
– 成本低受天气干扰小
– 测量精度差
– 测量范围小、距离近
3米以内
GNSS/IMU
车辆导航、定位
– 通过对卫星三角定位和惯性导航进行结合实现对车辆进行定位
– 容易受到城市建筑、隧道等障碍物的干扰,使得测量精度大打折扣
广域,高精度定位保持在10米以内
深入了解毫米波雷达工作原理与4D技术,提升对复杂交通环境的感知与理解。
揭秘高精度时间同步技术,确保自动驾驶系统各传感器的时间基准一致。
了解更多自动驾驶相关内容 →