端到端自动驾驶仿真解决方案,聚焦于提升仿真效率、保真度与灵活性。通过优化仿真引擎和数据传输机制,结合智能驾驶中间件技术,实现传感器原始数据的高效直传,避免繁琐的硬件接口与调试过程,从而大幅缩短开发周期,降低系统成本。核心创新包括一体化仿真后端,将场景、车辆动力
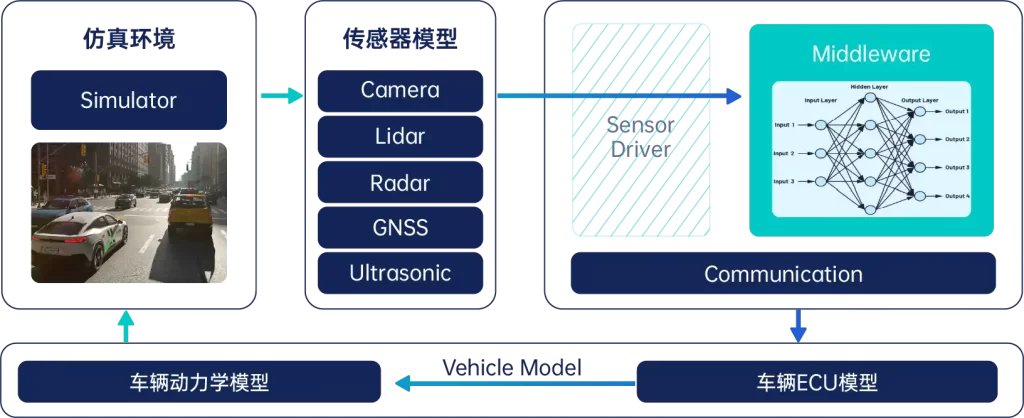
模拟从传感器输入到车辆控制的整个自动驾驶过程,支持创建复杂的交通场景,包括城市街道、高速公路和乡村公路等
模拟多种环境条件和交通状况,帮助开发和测试人员在虚拟环境中测试和优化ADAS/AD系统,确保其在真实世界中的可靠性和安全性
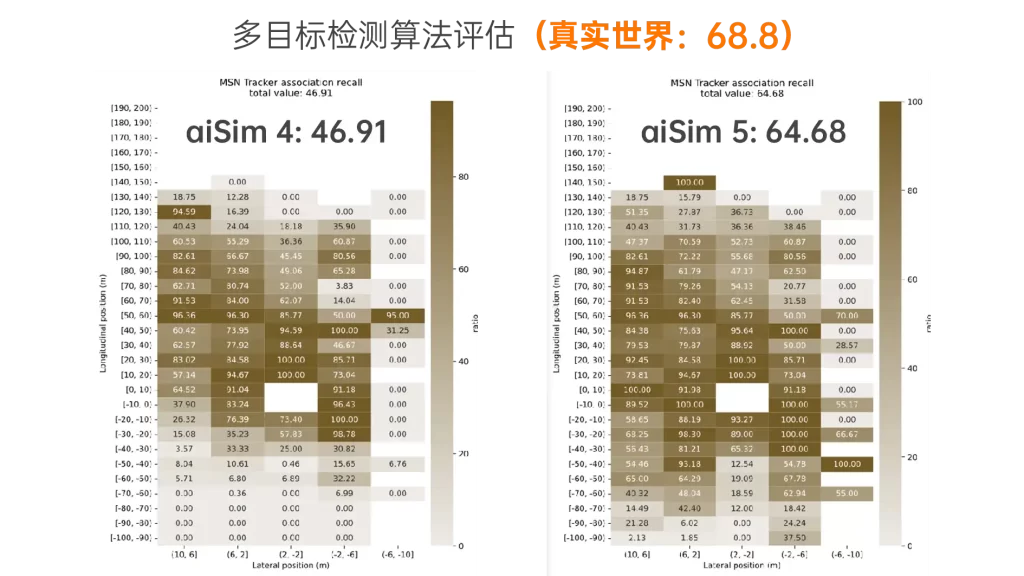
康谋提供的仿真场景高度还原真实世界的检测性能,提供可靠的仿真结果(多目标检测算法在康谋孪生仿真场景中的Recall结果为64.68,接近真实世界场景的Recall结果)
高保真度的仿真有助于开发者在虚拟环境中精确评估和优化自动驾驶系统,减少实车测试中的风险和成本
兼容 NeRF/3DGS 静态场景,支持自定义动态交通流,如十字路口车辆起步、狭窄道路车辆跟随等
构建GGSR(通用高斯泼溅渲染器),优化3D场景下 RayTracing 传感器渲染;优化广角镜头渲染,增强一致性;可自由移动视角,减少伪影产生
支持 ASAM Open Drive/Open Scenario 行业标准,符合 Euro NCAP 等标准场景、法规场景、功能安全场景评估
LogSim2WorldSim 通过云端自动化处理和分析原始数据,能够实现基于 Euro NCAP 等法规场景的切片、预测试和回放功能
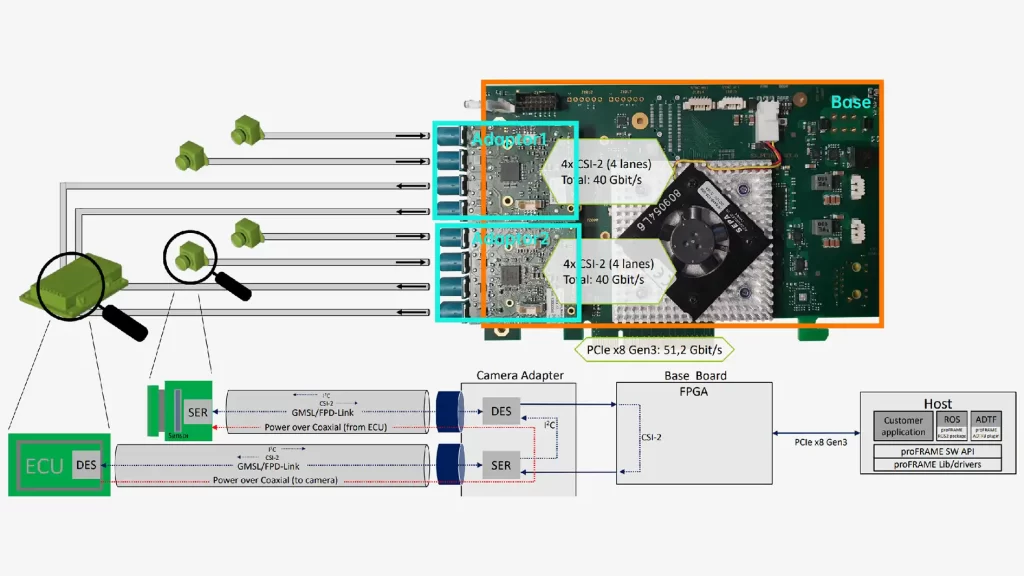
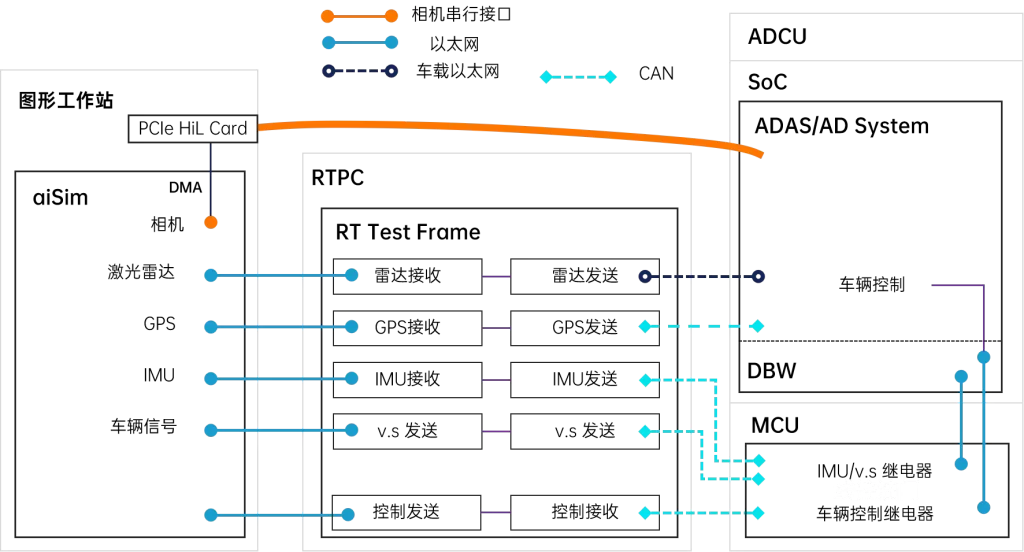
集成基于PCIe的视频注入板卡,实现低延迟高稳定的视频数据注入,通过DMA内存直接访问,实现数据从GPU到注入板卡之间的延时<1ms,确保了图像传输的高效性和实时性
提供4K级别的数据通道带宽,能够满足自动驾驶系统对于高分辨率、低延迟高稳定图像数据需求,提升HiL测试的精确度和可靠性
支持多GPU分布式仿真,利用多个GPU并行计算能力,显著提升仿真效率和性能
多GPU架构能使得复杂驾驶场景和算法在更短时间内完成测试,并为高保真传感器数据和场景合成数据实时处理提供强有力支持
解决真实数据采集成本高、周期长、覆盖率低的核心痛点,加速感知算法的迭代与验证。
提供与工业界标准对齐、支持全栈技术链实践、能产出高水平研究成果的先进实验环境。
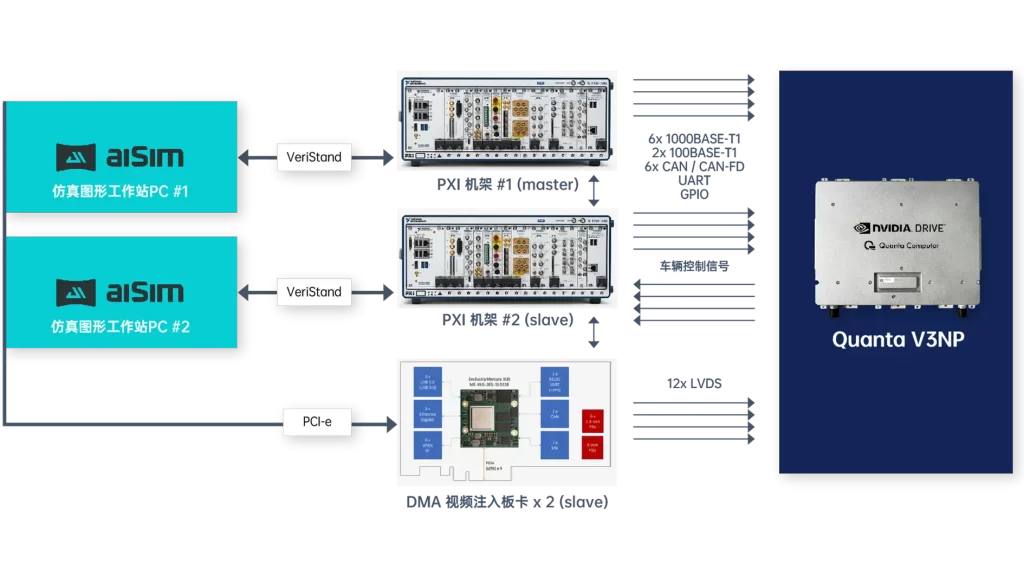
在HiL环境下基于场景进行实时ADAS/AD系统验证
12× 相机 + 6× 毫米波雷达实时运行展示
致力于为您提供适配项目需求的软硬件设备,以及全流程的技术支持和专业服务

{kind=link}





{kind=link}