
康谋自动驾驶软件在环测试方案
告别传统测试的效率瓶颈
释放自动驾驶研发的全部潜能
{kind=link}
告别传统测试的效率瓶颈
直接在HiL测试阶段验证算法,您是否面临这些困境?
测试资源紧张
HiL台架昂贵且数量有限,测试排队严重
调试成本高
算法迭代可能会面临硬件驱动环境的升级/部署,效率低
接口适配复杂
同算法框架、信号格式需要繁琐的集成适配
算法早期验证困难
模型层/算法逻辑层阶段,缺乏高保真虚拟环境进行闭环验证
从本地到云端,
构建完整的SiL测试体系
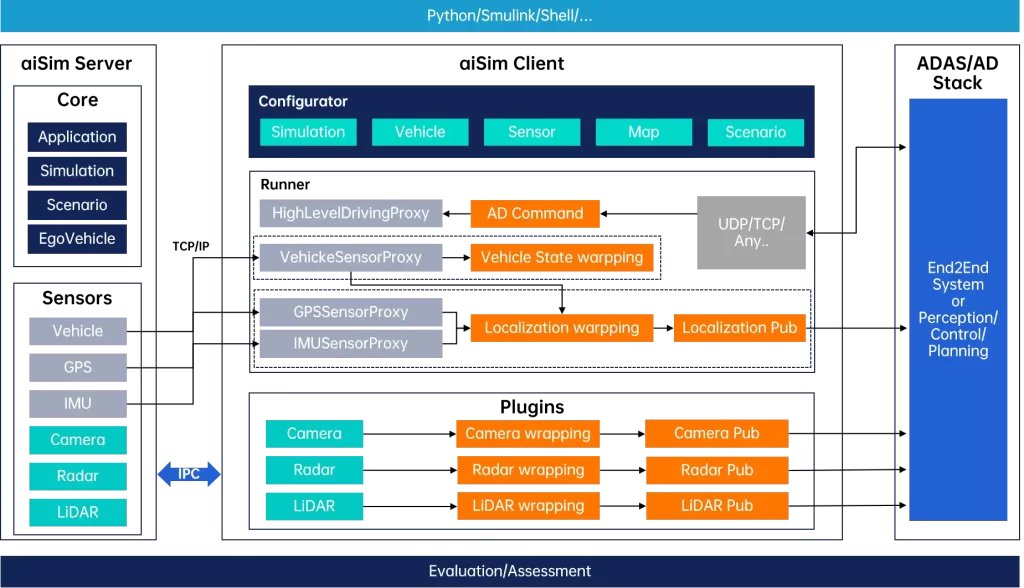
我们提供一套端到端的仿真解决方案,能够系统性地解决自动驾驶研发的核心挑战,在追求极致的创新速度与保障绝对的系统可靠性之间取得完美平衡。
基于康谋 aiSim 灵活开放的架构设计,开发者可以在本地快速构建虚拟车辆与传感器系统,实现算法闭环验证与自动化测试,显著缩短开发周期。
核心优势
重新定义软件在环测试体验,为自动驾驶算法研发提供全方位支持
模块化开放架构&无缝集成
- 开放的API与SDK
提供全面的API和SDK接口,支持用户自定义封装算法输入/输出,无需改动底层引擎即可与现有开发环境、算法框架和自动化测试方案深度整合,保护并扩展您的研发投资。
- 渲染与数据双重解耦
传感器信号与仿真数据接口从渲染引擎中完全解耦,可作为独立的模块无缝嵌入客户的现有控制栈,极大提升了集成的便捷性与系统的稳定性。
本地化极速迭代
- 本地桌面环境,分钟级编译调试
工程师本地即可快速编译、单步调试、设置断点和追踪变量,实现对复杂场景的100%确定性复现,快速定位算法缺陷。
- 脚本化自动执行
支持通过脚本一键驱动仿真、自动运行场景并进行批量回归测试,将工程师从重复性工作中解放出来。
- 兼容自定义评估体系
支持无缝接入客户自有的评估与指标体系,自动生成多维度性能报告,帮助工程师直观对比参数、量化算法优化效果。
高保真渲染与深度数据洞察
- 物理级渲染引擎
集成高保真物理渲染引擎,可实时观察车辆动态、复杂环境交互以及物理上精确的传感器响应,满足最严苛的感知与规控闭环测试需求。
- 多维度数据分析与对比
支持测试报告插件,自动生成关键指标曲线,并能对多轮测试结果进行导出与深度对比,帮助工程团队沉淀数据资产,构建内部数据集与验证知识库。
从 SiL 到 HiL 的无缝资产复用
- 统一的仿真环境与接口
提供标准化的接口定义与统一仿真环境,确保 SiL 阶段验证通过的模型、场景和测试用例,零成本、零修改直接迁移至 HiL 测试平台。
- 广泛兼容行业生态
全面兼容 NI、Simulink、FMU、ASAM 等行业标准软硬件生态,灵活构建从模型开发、软件测试到硬件验证的端到端测试与验证路径。
云端SiL方案
释放大规模测试潜力
基于容器化架构的 aiSim 云端平台,将本地验证流程无缝扩展至云端, 让算法验证从单点测试迈向大规模智能验证体系。
- 云原生弹性架构,实现大规模并行仿真
- 深度集成CI/CD,实现“代码即测试”的全自动化流程
- Web端一体化操作 —— 免安装、随时随地访问

重新定义软件在环测试体验
开放且可扩展的仿真平台,无缝覆盖原型设计到大规模验证全流程
{kind=link}