跳至正文
首页
产品系列
解决方案
技术服务
资源中心
新闻活动
关于康谋
数据采集
高性能车载服务器
数据采集平台
LVDS数据转换分析工具
车载以太网协议转换器
车载时间同步板卡
i210时间接收卡
智驾仿真
自动驾驶仿真模拟平台
一站式舱内合成数据仿真平台
世界提取器(3DGS)
机器人仿真
具身智能动力学仿真平台
New
数字孪生机器人仿真平台
ROS2小车课程
ROS2小车开发入门到部署课程
New
数据服务
图像视频数据脱敏工具
场景挖掘与Euro NCAP测试评估
自动驾驶辅助系统开发框架
系统开发软件教育版
智能数据管理平台
自动驾驶数据采集
高阶自动驾驶数采测试方案
多总线视频采集时间同步方案
多传感器时间同步方案
ROS2智驾小车及实训教学方案
端到端智驾仿真测试
软件在环(SiL)测试方案
硬件在环(HiL)测试方案
高保真自动驾驶场景重建方案
Euro NCAP道路测试评估方案
云课堂
技术博客
客户案例
产品资料
FAQ
新闻中心
展会活动
关于我们
联系我们
加入我们
技术分享
解决方案
自动驾驶数采与测试方案
BEV感知技术
BEV感知技术
随着自动驾驶技术的快速发展,车辆准确感知周围环境的能力变得至关重要。BEV(Bird's-Eye-View,鸟瞰图)感知技术,以其独特的视角和强大的数据处理能力,正成为自动驾驶领域的一大研究热点。
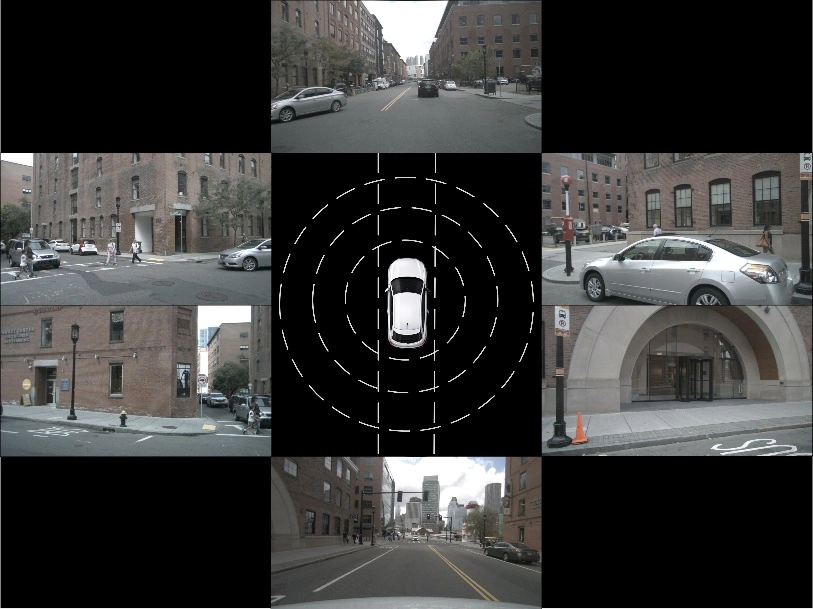
BEV感知技术,是一种从鸟瞰图视角(俯视图)出发的环境感知方法。与传统的正视图相比,BEV视角具有尺度变化小、视角遮挡少的显著优势,有助于网络对目标特征的一致性表达。基于这样的优势,可以更有效的对车辆周围环境进行感知。
图1:BEV感知图
BEV感知技术,是一种从鸟瞰图视角(俯视图)出发的环境感知方法。与传统的正视图相比,BEV视角具有尺度变化小、视角遮挡少的显著优势,有助于网络对目标特征的一致性表达。基于这样的优势,可以更有效的对车辆周围环境进行感知。
BEV感知算法的数据输入主要有图像和点云两种形式。根据数据源不同,BEV算法主要分为BEV Camera(纯视觉)、BEV LiDAR(基于激光雷达)和BEV Fusion(多模态融合)三类。其中,图像数据具有纹理丰富、成本低的优势,此外,基于图像的任务、基础模型相对成熟和完善,比较容易扩展到 BEV 感知算法中。
为了更好的训练BEV Camera感知算法,往往需要先搭建一个高质量的数据集。而搭建一套BEV感知数据采集系统,通常包括以下几个关键环节:
硬件选型与集成:
选合适的摄像头和计算采集平台,集成稳定系统
数据采集:
在实际环境中采集图像数据,覆盖不同场景、光照和天气
时间同步:
确保不同传感器数据时间精确同步,是后续算法训练的必要前提
系统调试和部署:
调试系统确保组件协同工作,部署到实际应用环境
因此,在实际搭建过程中,常会遇到技术复杂性高、成本投入大、数据质量与时间同步实现难、系统稳定性与可靠性要求高等挑战。
返回顶部
更多内容
合成数据开发的应用与实践
高逼真合成数据助力智驾“看得更准、学得更快”
更多技术分享
了解更多自动驾驶相关内容 →